09127203270

مثالهای کاربردی:
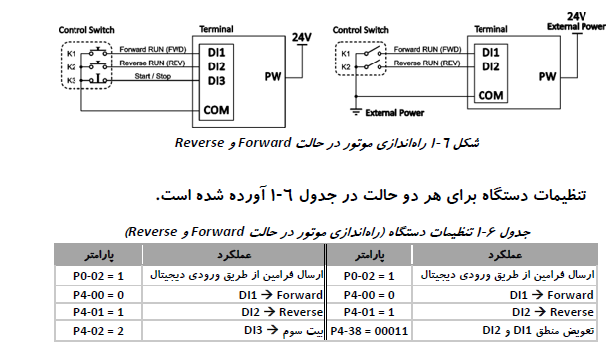
- راه اندازی موتور در حالت Forward و میکند.
مثالهای زیر وضعیت چرخش موتور را با استفاده از ورودیهای دیجیتال کنترل میکند. در مثال اول از منطق دو بیتی نوع اول و در مثال دوم از منطق سه بیتی نوع اول استفاده شده است. نحوه سیمکشی و تنظیمات دستگاه در شکل 6 - 1 برای هر دو مثال ارائه شده است.
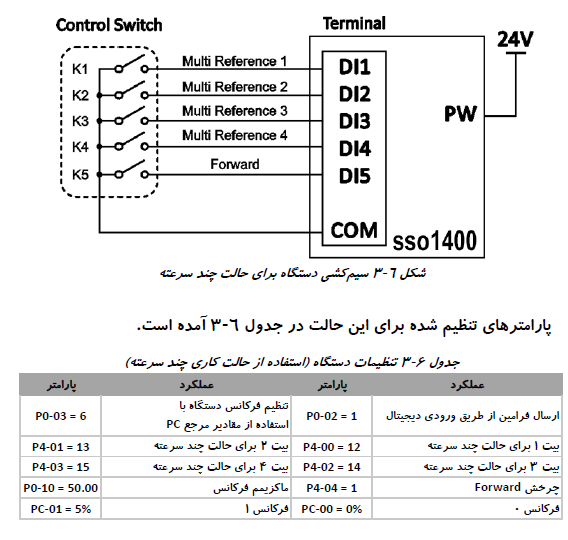
استفاده از حالت کاری چند سرعته:
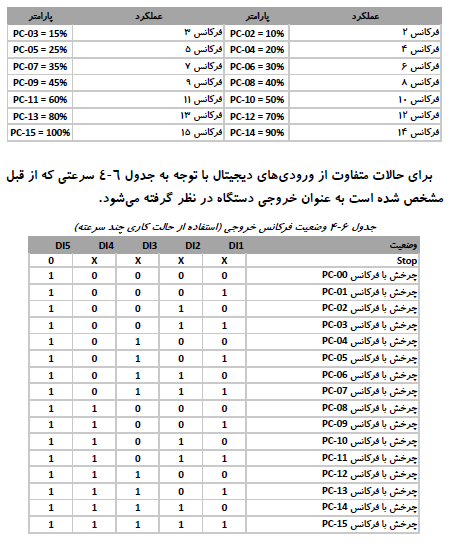
در مثال زیر فرکانس خروجی دستگاه با استفاده از ورودیهای دیجیتال تعیین میشود. در این حالت تعداد حداکثر شانزده فرکانس از پیش تعیین شده را میتوان بااستفاده از ترکیبی از ورودیهای دیجیتال به عنوان فرکانس کاری دستگاه انتخاب کرد.نحوه سیمکشی و تنظیمات دستگاه برای مثال ذکر شده در شکل 6 - 3 قابل مشاهده است.
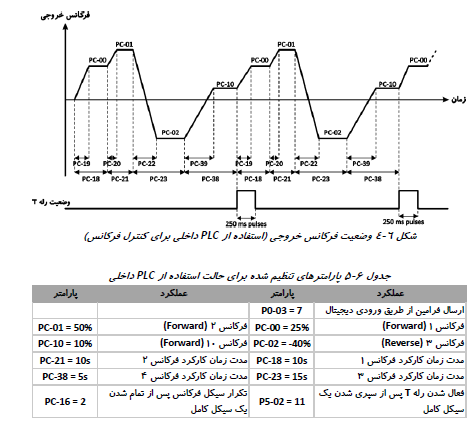
استفاده از PLC داخلی برای کنترل فرکانس:
در مثال زیر PLC به عنوان منبع تولید فرکانس خروجی، فرآیند تغییرات فرکانس را کنترل میکند. در شکل 6 - 4 فرکانسهای تعیین شده برای PLC و همچنین مدت زمانو جهت چرخش آنها نشان داده شده است.در این مثال فرکانسهای تعیین شده توسط پارامترهای PC-00 ، PC-01 ، PC-02
و PC-10 به صورت گردشی مورد استفاده میباشند و پس از پایان هر سیکل رله T فعال خواهد شد.
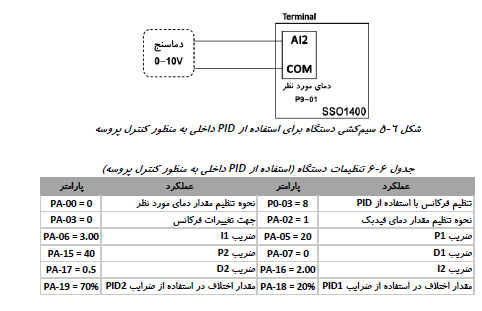
استفاده از PID داخلی به منظور کنترل پروسه:
در مثال زیر PID داخلی به منظور کنترل دمای یک اتاق توسط یک فن که سرعت چرخش آن میزان گرمای داخل اتاق را تحت تأثیر قرار میدهد، مورد استفاده قرار گرفته است. در این مثال دمای مورد نظر توسط پارامتر PA-01 و دمای واقعی که توسط ورودی آنالوگ AI2 به فیدبک کنترلر داده میشود. در صورت وجود اختلاف میان این دو مقدار، فرکانس خروجی دستگاه با جهت چرخش Forward تغییر میکند. در حالتی که خطای میان مقدار مورد نظر و مقدار فیدبک بیشتر از مقدار PA-20 باشد، کنترلر از ضرایب PID2 استفاده میکند.
نحوه سیمکشی در شکل 6 - 5 و تنظیمات دستگاه در جدول 6 - 6 قابل مشاهده است.
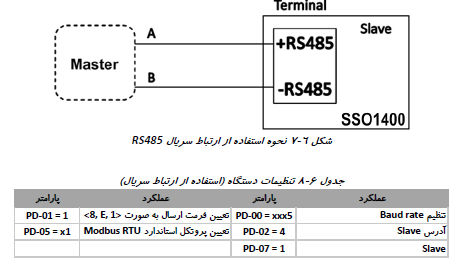
استفاده از ارتباط سریال RS485 برای کنترل و مانیتورینگ:
در این مثال با استفاده از ارتباط سریال RS485 و پروتکل Modbus سعی شده است که فرکانس خروجی دستگاه و Start/Stop آن تحت کنترل باشد. در این مثال پارامترهایی همچون ولتاژ خط، فرکانس خروجی، جریان خروجی و همچنین خطاهای موجود در سیستم مانیتور و بررسی شوند. همچنین نحوه تغییر پارامترهای دستگاه به عنوان مثال پارامترهای مربوط به مدت زمان شتابگیری را نشان میدهد.تنظیمات ارتباط سریال RS485 دستگاه به
صورت Baud Rate = 9600 و Data Format = <8, E, 1> میباشد. در شکل 6 - 7 نحوه اتصال دستگاه به خط RS485 و در جدول 6 - 8 پارامترهای تنظیمجدول 6 - 8 پارامترهای تنظیم شده برای ارتباط سریال Rs485 نشان داده شده است.Slave ID = 0x04
برای مشاهده پارامترها و مانیتورینگ از فانکشن کد 0x03 در پروتکل مد باس استفاده میکنیم. با توجه به جدول آدرسهای ارتباط سریال )که در ضمیمه C آورده شده است( و آدرس Slave دستگاه، پیامهای زیر را از طرف دستگاه Master به اینورترفرستاده تا بتوان مقادیر پارامتر مورد نظر را به دست آورد.
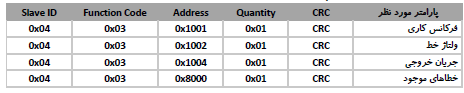
مقدار دریافتی در پاسخ هر فرمان، مقدار متناظر با پارامتر را نشان میدهد. همچنین در صورت صفر بودن پاسخ خطاهای موجود به معنای بدون خطا بودن سیستم است ودر غیر این صورت کد خطای اتفاق افتاده نشان داده می شود.به منظور تنظیم فرکانس کاری و ارسال فرمان Start/Stop از فانکشن کد 0x06 درپروتکل Modbus استفاده میکنیم. با توجه به جدول آدرسها و آدرس Slave ، پیام های زیر را از طرف دستگاه Master به اینورتر ارسال میکنیم.

برای تنظیم هر یک از پارامترهای دستگاه امکان استفاده از ارتباط سریال نیز وجود دارد. به عنوان مثال برای تنظیم پارامتر P0-18 ، P2-03 و PA-11 میتوان از دستورات زیر استفاده نمود.

مقداردهی پارامترها توسط ارتباط سریال به دو نحو امکان پذیر است:
الف:ذخیره مقدار مورد نظر در EEPROM و اجرای آن: در این حالت پارامترهای
گروه P با آدرس 0xFXXX و پارامترهای گروه D با آدرس 0xAXXX شروع می شود.
ب:اجرای دستور و استفاده از RAM دستگاه: در این حالت پارامترهای گروه
P با آدرس 0x0XXX و پارامترهای گروه D با آدرس 0x4XXX شروع
میشوند.
در مواردی که تنظیم پارامترها مدام تغییر خواهند کرد، برای جلوگیری از آسیب رسیدن به EEPROM دستگاه بهتر است از RAM دستگاه استفاده شود.
تماس با ما
شماره تلفن: -88922510-021
آدرس:تهران -بالاتر از میدان ولیعصر کوچه قیومی پلاک 32 واحد 8

واحد فروش 66537904-021
واحد خدمات پس از فروش: 88905176-021
پیگیری سفارشات خارجی : 88915862-021





